



品牌分類
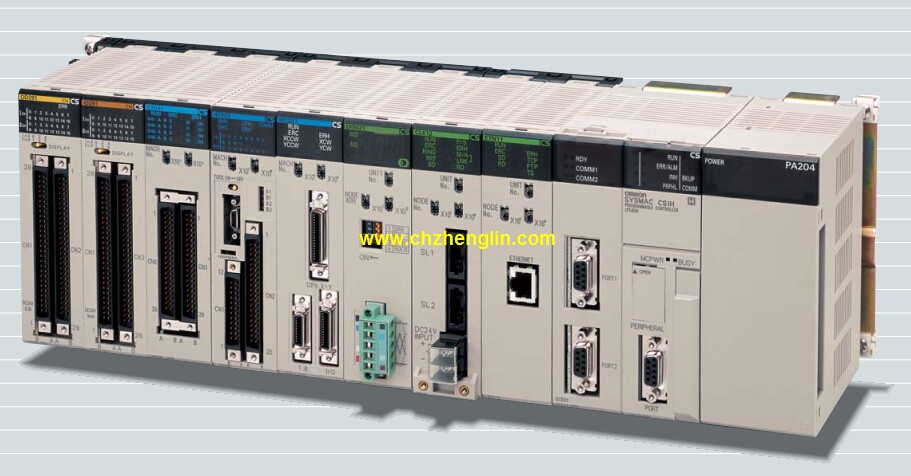
歐姆龍CS1W-V600C12是什么,CS1W-V600C12怎么樣
 下一條:
下一條:  上一條:
上一條: 歐姆龍 CS1W-V600C12
CS1W-V600C12產品特點及功能介紹:
控制輸出接口:控制MECHATROLINK-II同步通信執行的指令。
梯形圖編程的直接操作。
控制模式:位置控制、速度控制或扭矩控制。
軸數:16軸。
通過簡易操作、減少接線、批設置和批管理降低TCO
通過一個支持MECHATROLINK-II*的位置控制單元,對運動網絡中多達16軸的伺服器進行控制CS1W-V600C12
*MECHATROLINK-II是MECHATROLINK成員協會的注冊商標。
體積更小
使用一個CJ系列單元大小的機身多可控制16個軸的定位。
緊湊型機身是滿足降低多軸控制設備大小需求的佳之選。
通過靈活接線實現單電纜連接
有了MECHATROLINK-II,連接伺服驅動器是一件很容易的事。
只使用單根電纜(2芯屏蔽雙絞線電纜)。
接線減少,總電纜長度為50m(16軸為30m),為構建系統提供更多自由。
啟動和維護時間減少
可以從PLC設置伺服參數。
這表明從一個位置就可以進行設置和調整,而不需要分別連接到每個伺服驅動器。
輕松擴展
可以構建可輕松擴展的系統,這樣使用幾個軸時的效率與以后使用多達16個軸時的效率一樣高。
使用MA功能進行多軸鏈接操作
對線性插補新增的插補軸停止模式設置和軸間容許偏移設置使得軸之間的鏈接操作更容易設置。2軸脈沖輸入,
2軸脈沖輸出,
12 DC輸入,
8晶體管輸出。
將單元安裝到CPU裝置時,多可控制960點。
CS1提高空間效率。只需將10個基本I/O單元(各96個I/O點)安裝到CPU裝置,
即可控制多達960個I/O點。或者,通過按住五個模擬量輸入單元和五個模擬量輸出單元,
也可控制多達80個模擬量I/O點。
提高了數據鏈接、遠程I/O通信和協議宏的刷新性能。
以前,僅在執行指令后的I/O刷新期間,CPU總線單元才會發生I/O刷新。
但是,借助新CS1,通過使用DLNK指令,可立即刷新I/O。
立即刷新特定于CPU總線單元的過程意味著可提高CPU總線單元的刷新響應性,
如執行指令時用于數據鏈接和DeviceNet遠程I/O通信和分配的CIO區/DM區字的過程。
大容量CPU單元可增加組件控制電源。
CS1 CPU單元均享有多達5120個I/O點的出眾容量、250K步的編程、448字的數據存儲器(包括擴展數據存儲器)和4096個定時器/計數器。
由于具備較大編程容量,CS1 PLC小僅適用于大型系統,
還可輕松處理增值應用和其他數據處理。
數據處理期間的周期時間變化減少
需要較長執行時間的指令
(如表數據處理指令將周期時間變化降到低并保持穩定I/O響應和文本字符申指令)將在多個周期內處理。線纜
SYSMAC BUS/2系統是PC同I/O裝置、FA元件群連接的高速BUS網絡。
由于遠距離、分散控制,
接線減少和遠程、編程提高了日常維護的效率。控制輸出接口:EtherCAT通信執行的控制指令。
定位功能:存儲操作、梯形圖編程的直接操作。
軸數:4軸。
已分配的單元數編號:1。
電流消耗(A)5V:0.46。
線性插補期間軸之間的偏移。
廣泛的定位操作。
配備EtherCAT接口的CJ系列位置控制單元。
EtherCAT非凡的控制性能和簡單的操作提高了生產效率。
傳送速度100Mbps的EtherCAT通信實現快速且地位置控制。
本位置控制單元提供了大量位置控制功能。
EtherCAT是Beckhoff Automation GmbH的注冊商標。
快速定位操作:使用PLC啟動指令花費0.15~0.4ms(以上)來啟動伺服操作。
支持帶有對編碼器的伺服電機。
線性插補期間軸之之間的偏移。
廣泛的定位操作。
隨附存儲操作功能。
帶有脈沖串類型位置控制單元的公用控制接口(CJ11W-NC@@4)。
EtherCAT的快速通信 (短250?s的通信周期)。
除了伺服控制外,可以連接變頻器、視覺傳感器以及支持EtherCAT的其它I/O設備。
支持伺服電機速度控制和扭矩限制輸出。
CS1W-V600C12操作手冊/說明書/選型樣本下載地址: /searchDownload.html?Search=CS1W-V600C12&select=5
控制輸出接口:控制MECHATROLINK-II同步通信執行的指令。
梯形圖編程的直接操作。
控制模式:位置控制、速度控制或扭矩控制。
軸數:16軸。
通過簡易操作、減少接線、批設置和批管理降低TCO
通過一個支持MECHATROLINK-II*的位置控制單元,對運動網絡中多達16軸的伺服器進行控制CS1W-V600C12
*MECHATROLINK-II是MECHATROLINK成員協會的注冊商標。
體積更小
使用一個CJ系列單元大小的機身多可控制16個軸的定位。
緊湊型機身是滿足降低多軸控制設備大小需求的佳之選。
通過靈活接線實現單電纜連接
有了MECHATROLINK-II,連接伺服驅動器是一件很容易的事。
只使用單根電纜(2芯屏蔽雙絞線電纜)。
接線減少,總電纜長度為50m(16軸為30m),為構建系統提供更多自由。
啟動和維護時間減少
可以從PLC設置伺服參數。
這表明從一個位置就可以進行設置和調整,而不需要分別連接到每個伺服驅動器。
輕松擴展
可以構建可輕松擴展的系統,這樣使用幾個軸時的效率與以后使用多達16個軸時的效率一樣高。
使用MA功能進行多軸鏈接操作
對線性插補新增的插補軸停止模式設置和軸間容許偏移設置使得軸之間的鏈接操作更容易設置。2軸脈沖輸入,
2軸脈沖輸出,
12 DC輸入,
8晶體管輸出。
將單元安裝到CPU裝置時,多可控制960點。
CS1提高空間效率。只需將10個基本I/O單元(各96個I/O點)安裝到CPU裝置,
即可控制多達960個I/O點。或者,通過按住五個模擬量輸入單元和五個模擬量輸出單元,
也可控制多達80個模擬量I/O點。
提高了數據鏈接、遠程I/O通信和協議宏的刷新性能。
以前,僅在執行指令后的I/O刷新期間,CPU總線單元才會發生I/O刷新。
但是,借助新CS1,通過使用DLNK指令,可立即刷新I/O。
立即刷新特定于CPU總線單元的過程意味著可提高CPU總線單元的刷新響應性,
如執行指令時用于數據鏈接和DeviceNet遠程I/O通信和分配的CIO區/DM區字的過程。
大容量CPU單元可增加組件控制電源。
CS1 CPU單元均享有多達5120個I/O點的出眾容量、250K步的編程、448字的數據存儲器(包括擴展數據存儲器)和4096個定時器/計數器。
由于具備較大編程容量,CS1 PLC小僅適用于大型系統,
還可輕松處理增值應用和其他數據處理。
數據處理期間的周期時間變化減少
需要較長執行時間的指令
(如表數據處理指令將周期時間變化降到低并保持穩定I/O響應和文本字符申指令)將在多個周期內處理。線纜
SYSMAC BUS/2系統是PC同I/O裝置、FA元件群連接的高速BUS網絡。
由于遠距離、分散控制,
接線減少和遠程、編程提高了日常維護的效率。控制輸出接口:EtherCAT通信執行的控制指令。
定位功能:存儲操作、梯形圖編程的直接操作。
軸數:4軸。
已分配的單元數編號:1。
電流消耗(A)5V:0.46。
線性插補期間軸之間的偏移。
廣泛的定位操作。
配備EtherCAT接口的CJ系列位置控制單元。
EtherCAT非凡的控制性能和簡單的操作提高了生產效率。
傳送速度100Mbps的EtherCAT通信實現快速且地位置控制。
本位置控制單元提供了大量位置控制功能。
EtherCAT是Beckhoff Automation GmbH的注冊商標。
快速定位操作:使用PLC啟動指令花費0.15~0.4ms(以上)來啟動伺服操作。
支持帶有對編碼器的伺服電機。
線性插補期間軸之之間的偏移。
廣泛的定位操作。
隨附存儲操作功能。
帶有脈沖串類型位置控制單元的公用控制接口(CJ11W-NC@@4)。
EtherCAT的快速通信 (短250?s的通信周期)。
除了伺服控制外,可以連接變頻器、視覺傳感器以及支持EtherCAT的其它I/O設備。
支持伺服電機速度控制和扭矩限制輸出。
CS1W-V600C12操作手冊/說明書/選型樣本下載地址: /searchDownload.html?Search=CS1W-V600C12&select=5
...更多相關型號市場價 >>>>
相關產品
歐姆龍
ID傳感器單元
CS1W-V600C12
連接的ID系統:V680系列2頭。
使用的單元編號:2個單元編號。
利用梯形圖程
歐姆龍
ID傳感器單元
CS1W-V600C11
連接的ID系統:V680系列1頭。
使用的單元編號:1個單元編號。
只需在PLC
歐姆龍
ID傳感器單元
CJ1W-V600C12
接線ID系統:RFID系統V600系列(短距離用電磁結合方式)。
連接RW頭數: